A simple working concept of Displacer Level Transmitter can be illustrated in the figure below;
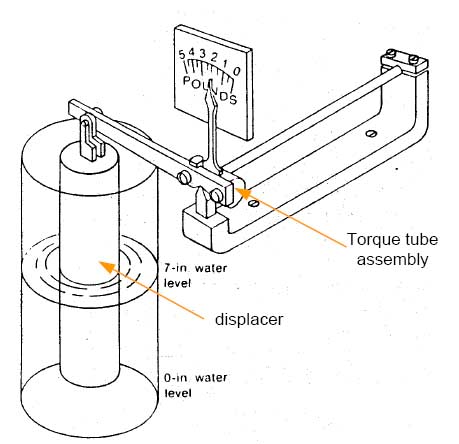
According to Archimedes Principle, the displacer, when submerged in liquid, will ‘lose’ its weight, and this weight loss is proportional to the level of the liquid.
Thus, a level, density, or interface level change in the measured fluid causes a change in the displacer position. This change is transferred to the torque tube assembly.
As the measured fluid changes, the torque tube assembly rotates and the indicating needle attached to the torque tube will have indication.
This rotary motion can then be extent for remote signal and indication. It is transferred to the transmitter level assembly. The rotary motion moves a magnet attached to the lever assembly, changing the magnetic field that is sensed by the Half-effect position sensor.
The sensor then converts the magnetic field signal to an electronic signal. The current drier circuit in the transmitter develops a 4~20mA signal proportional to the dc amplifier voltage output.
