The primary requirement of a control system is that it be reasonably stable. In other words, its speed of response must be fairly fast, and this response must show reasonable damping. A control system must also be able to reduce the system error to zero or to a value near zero.
SYSTEM ERROR
The system error is the difference between the value of the controlled variable set point and the value of the process variable maintained by the system. The system error is expressed in equation form by the following:
e(t) = PV(t) – SP(t)
where:-
e(t) = system error as a function of time (t)
PV(t) = the process variable as a function of time
SP(t) = is the set point as a function of time
SYSTEM RESPONSE
-The main purpose of a control loop is to maintain some dynamic process variable (pressure, flow, temperature, level, etc.) at a prescribed operating point or set point. System response is the ability of a control loop to recover from a disturbance that causes a change in the controlled process variable.
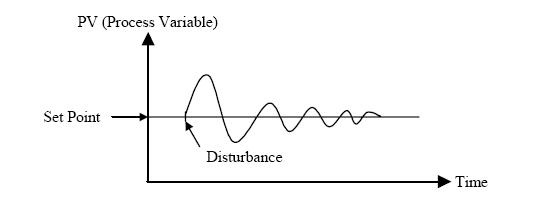
-There are two general types of good response: underdamped (cyclic response) and damped. (Figure 1) shows an underdamped or cyclic response of a system in which the process variable oscillates around the set point after a process disturbance. The wavy response line shown in the figure represents an acceptable response if the process disturbance or change in set point was large, but it would not be an acceptable response if the change from the set point was small.
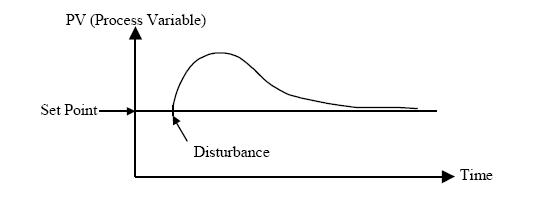
(Figure 2) shows a damped response where the control system is able to bring the process variable back to the operating point with no oscillations.
Control Loop Design Criteria
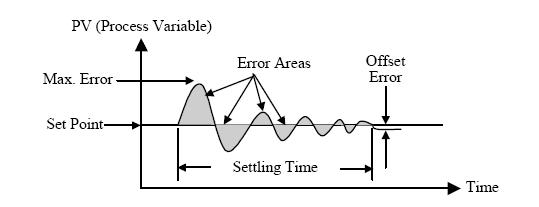
Many criteria are employed to evaluate the process control’s loop response to an input change. The most common of these include settling time, maximum error, offset error, and error area.
When there is a process disturbance or a change in set point, the settling time is defined as the time the process control loop needs to bring the process variable back to within an allowable error. The maximum error is simply the maximum allowable deviation of the dynamic variable. Most control loops have certain inherent linear and nonlinear qualities that prevent the system from returning the process variable to the set point after a system change. This condition is generally called “offset error” . The error area is defined as the area between the response curve and the set point line as shown by the shaded area in (Figure 3).
These evaluation criteria are general measures of control loop behavior that are used to determine the adequacy of the loop’s ability to perform some desired function.