The Magnetostrictive sensor consists of
(1) a magnetostrictive waveguide sensing element(wire) in the stem;
(2) and an external permanent magnet inside the float;
(3) when the sensing wire pulses a current signal at stem in fixed time intervals;
(4) and create one magnetic field;
(5) travel along with the waveguide tube, on the other hand, the moving float’s permanent magnet will create another magnetic field following the liquid up/down change, those two magnetic field will be intersected and produce a torsion stress wave;
Magnetostrictive Sensor
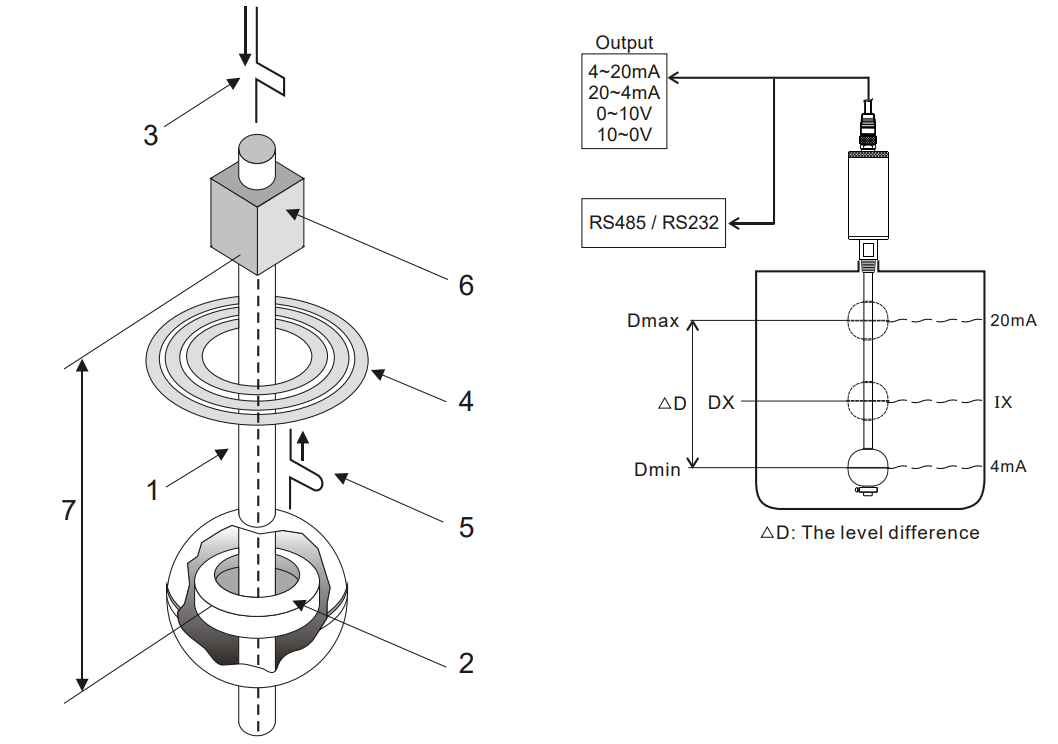
(6) (waveguide twist) to be induced in the wire, the torsion wave propagates along the wire at a sonic speed until the pulse is detected at the housnig of sensing elements;
(7) then it will convert the received mechnical torsion into an electrical return pulse by measuring the elapsed time between the start and return pulse, then converts it into a 4~20mA output proportional to level being measured.
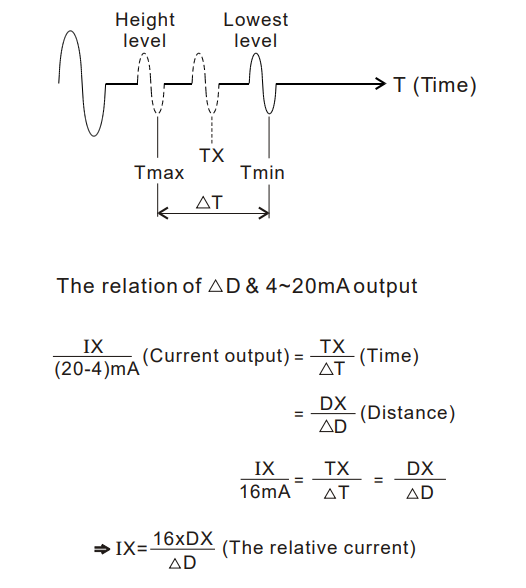
Formula
Source: FineTek