The goal of the tutorial is for you to learn about the PID controller and a few basic tuning rules of it.
After taking this lesson, you will be able to
-
relate PID controller parameters to step response characteristics of the controlled system, and
-
apply the famous Ziegler-Nichols tuning method to come up with an initial set of working PID parameters for an unknown system.
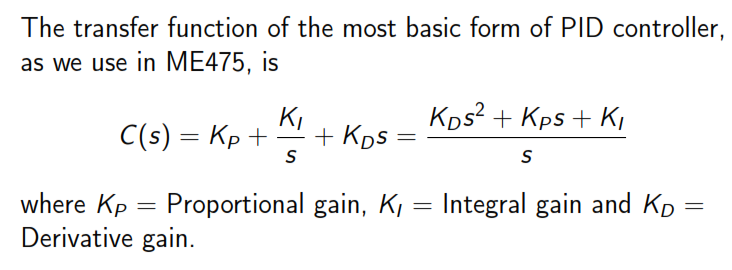
What is a PID controller?
A PID controller is a simple three-term controller.
The letters P, I and D stand for:
P - Proportional
I - Integral
D - Derivative
Why learn the PID controller?
Because PID Controllers are everywhere! Due to its simplicity and excellent if not optimal performance in many applications, PID controllers are used in more than 95% of closed-loop industrial processes.
It can be tuned by operators without extensive background in Controls, unlike many other modern controllers that are much more complex but often provide only marginal improvement. In fact, most PID controllers are tuned on-site.
How do the PID parameters affect system dynamics?
We are most interested in four major characteristics of the closed-loop step response. They are
-
Rise Time: the time it takes for the plant output y to rise beyond 90% of the desired level for the first time.
-
Overshoot: how much the the peak level is higher than the steady state, normalized against the steady state.
-
Settling Time: the time it takes for the system to converge to its steady state.
-
Steady-state Error: the difference between the steady-state output and the desired output.
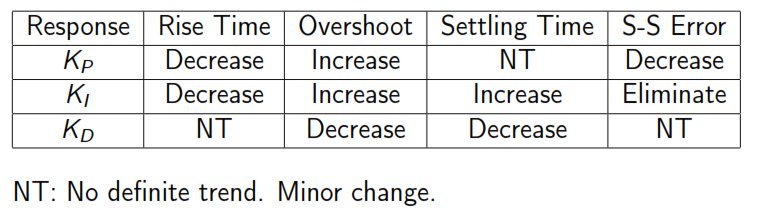
How do the PID parameters affect system dynamics?
The effects of increasing each of the controller parameters Kp , Ki and Kd can be summarized as
Download
PID Controller Tuning.pdf (255.8 KB)