PLC wiring
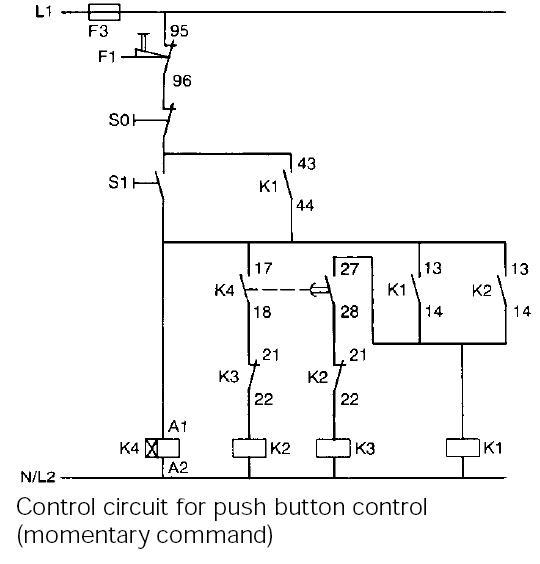
S0 = ‘OFF’ Push button
S1 = ‘ON’ Push button
K1 = Line contactor
K2 = Star contactor
K3 = Delta contactor
K4 = Star delta timer (7PU60 20)
F2 = Overload relay
F1 = Backup fuse
F3 = Control circuit fuse

This is a starting method that reduces the starting current and starting torque. The device normally consists of three contactors, an overload relay and a timer for setting the time in the star-position (starting position). The motor must be delta connected during a normal run, in order to be able to use this starting method. The received starting current is about 30 % of the starting current during direct on line start and the starting torque is reduced to about 25 % of the torque available at a D.O.L start.
This starting method only works when the application is light loaded during the start. If the motor is too heavily loaded, there will not be enough torque to accelerate the motor up to speed before switching over to the delta position. When starting up pumps and fans for example, the load torque is low at the beginning of the start and increases with the square of the speed. When reaching approx. 80-85 % of the motor rated speed the load torque is equal to the motor torque and the acceleration ceases.
To reach the rated speed, a switch over to delta position is necessary, and this will very often result in high transmission and current peaks. In some cases the current peak can reach a value that is even bigger than for a D.O.L start. Applications with a load torque higher than 50 % of the motor rated torque will not be able to start using the start-delta starter.
Wiring of Star Delta Starter with Timer Control Panel

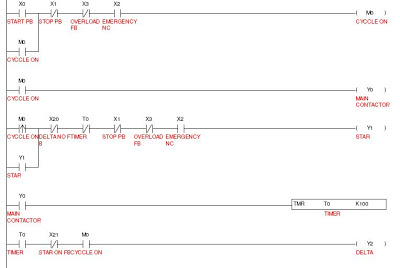
PLC Program for Star Delta Starter