Tachogenerator works on the principle of variable reluctance. It consists of an assembly of a toothed wheel and a magnetic circuit as shown in figure.
Techogenerator
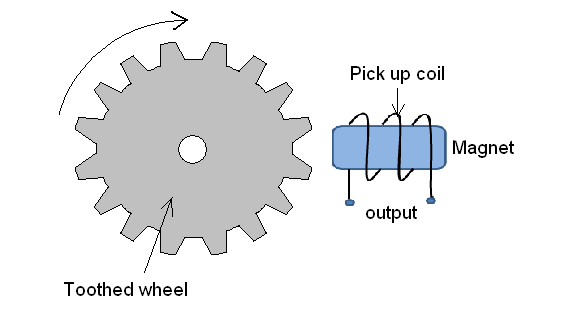
Toothed wheel is mounted on the shaft or the element of which angular motion is to be measured. Magnetic circuit comprising of a coil wound on a ferromagnetic material core.
As the wheel rotates, the air gap between wheel tooth and magnetic core changes which results in cyclic change in flux linked with the coil. The alternating emf generated is the measure of angular motion.
A pulse shaping signal conditioner is used to transform the output into a number of pulses which can be counted by a counter.
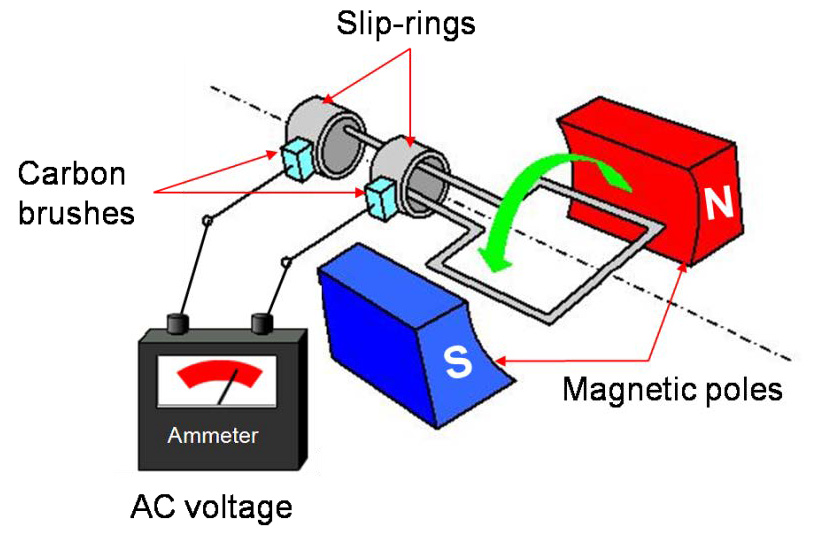
An alternating current (AC) generator can also be used as a techognerator. It comprises of rotor coil which rotates with the shaft. Above Figure shows the schematic of AC generator. The rotor rotates in the magnetic field produced by a stationary permanent magnet or electromagnet.
During this process, an alternating emf is produced which is the measure of the angular velocity of the rotor. In general, these sensors exhibit nonlinearity error of about ± 0.15% and are employed for the rotations up to about 10000 rev/min.