PID controller constants must be set according to the characteristics of the controlled system in order to perform suitable temperature control. With previous Controllers, the auto-tuning (AT) function was supported to calculate the PID constants.
This meant that starting auto-tuning had to be specified for the Controller and disturbances in the temperature had to be created, such as occur in the limit cycle method.
With self-tuning, the Controller itself determines the start of tuning and tuning is possible without disturbances in the temperature being controlled.
In other words, PID constants are adjusted to the characteristics of the controlled system to continuously enable optimum control.
There are three modes that are used for self-tuning.
(1) Performing tuning and calculating PID constants when set values are changed.
(2) Correcting PID constants when there is external disturbances in the temperature so that the temperature falls within a specified range.
(3) Correcting PID constants when hunting occurs to eliminate hunting.
Applicable Models: Thermac the K, and N Series
*The N Series supports only mode 1.
The step response method, a typical calculation method for self-tuning, is described below.
Step Response Method
The set value is set to the most commonly used value.
A manipulated variable of 100% is output in stepwise fashion and the maximum temperature ramp ® and the lost time (L) are calculated and used to calculate the PID constants.

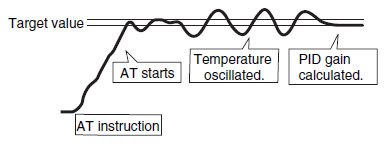
Reference Information: Differences between Auto-tuning and Self-tuning
Auto-tuning (AT)
Features:
(1) Auto-tuning is executed only when specified.
(2) A limit cycle signal is output to disturb the temperature in order to perform tuning.
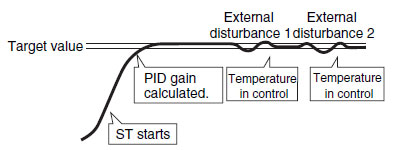
Self-tuning (ST)
Features:
(1) The Controller determines when self-tuning is to be performed.
(2) A signal is not output to disturb the temperature.
Source: omron