Three-position Control Mode is One of the best example for multiposition control mode is three-position control mode, which can be expressed in the following analytical form:
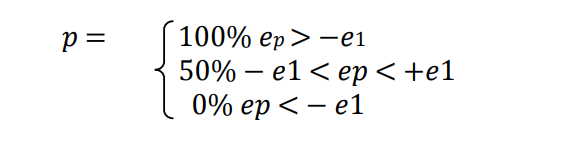
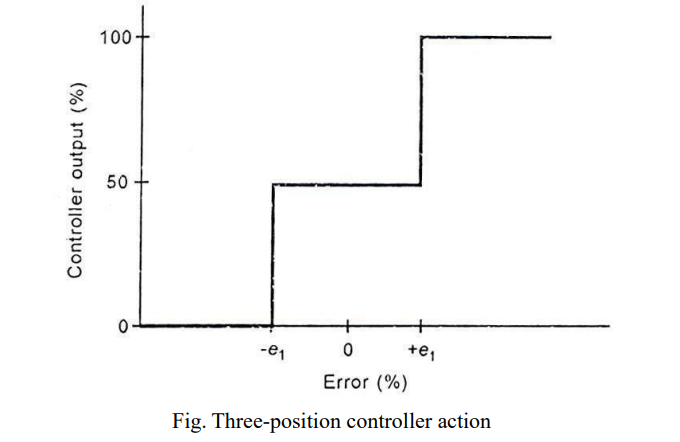
As long as the error is between +e1 and -e1 of the set point, the controller stays at some nominal setting indicated by a controller output of 50%. If the error exceeds the set point by +e1 or more, then the output is increased to 100%. If it is less than the set point by -e1 or more, the controller output is reduced to zero. Figure illustrates three-position mode graphically.
The three-position control mode usually requires a more complicated final control element, because it must have more than two settings. Below Fig. shows the relationship between the error and controller output for a three-position control. The finite time required for final control element to change from one position to another is also shown.
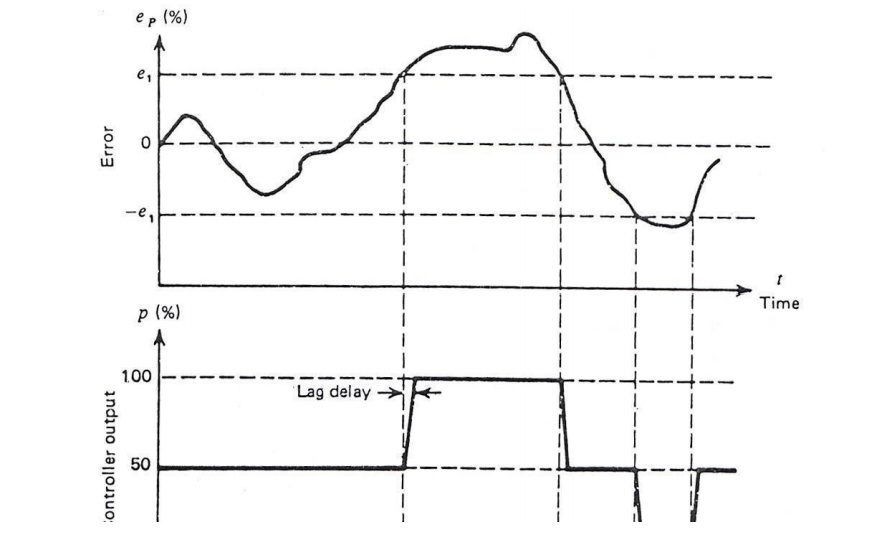
Fig. Relationship between error and three-position controller action, including the effectsoflag
The graph shows the overshoot and undershoots of error around the upper and lower setpoints. This is due to both the process lag time and controller lag time, indicated by the finite time required for control element to reach new setting.