To understand just how different FOUNDATION Fieldbus is from other digital instrument systems,
Foundation Fieldbus Tutorials
consider a typical layout for a distributed control system (DCS), where all the calculations and logical “decisions” are made in dedicated controllers, usually taking the form of a multi-card “rack” with processor(s), analog input cards, analog output cards, and other types of I/O (input/output) cards:
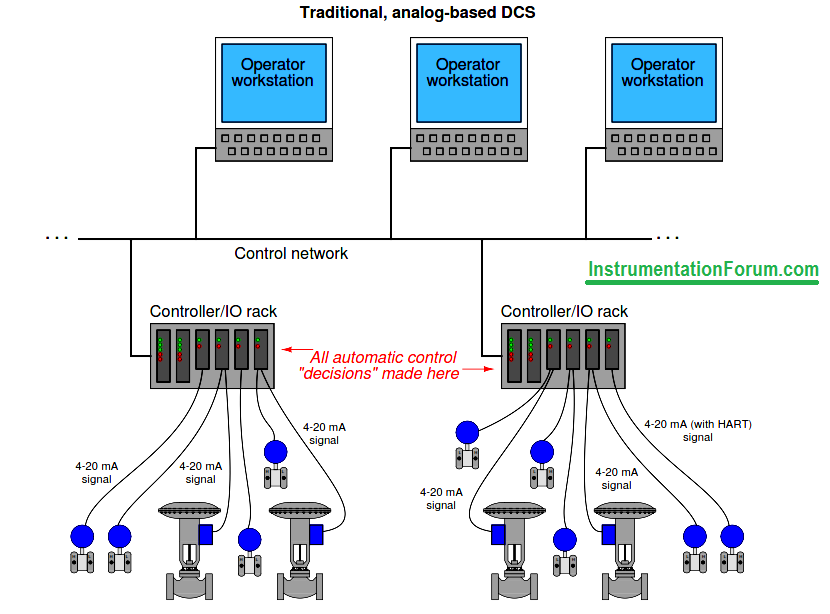
Information is communicated in analog form between the DCS controllers and the field instruments. If equipped with the proper types of I/O cards, the DCS may even communicate digitally with some of the field instruments using HART protocol. This allows remote configuration and diagnostic testing of field instruments from the host system, or from anywhere along the cable when using a hand-held HART communicator.
It is even possible to build a control system around a DCS using all digital field instruments, using a protocol such as Profibus PA to exchange process variable (PV) and manipulated variable (MV) signals to and from the DCS controllers at digital speeds far exceeding that of HART:
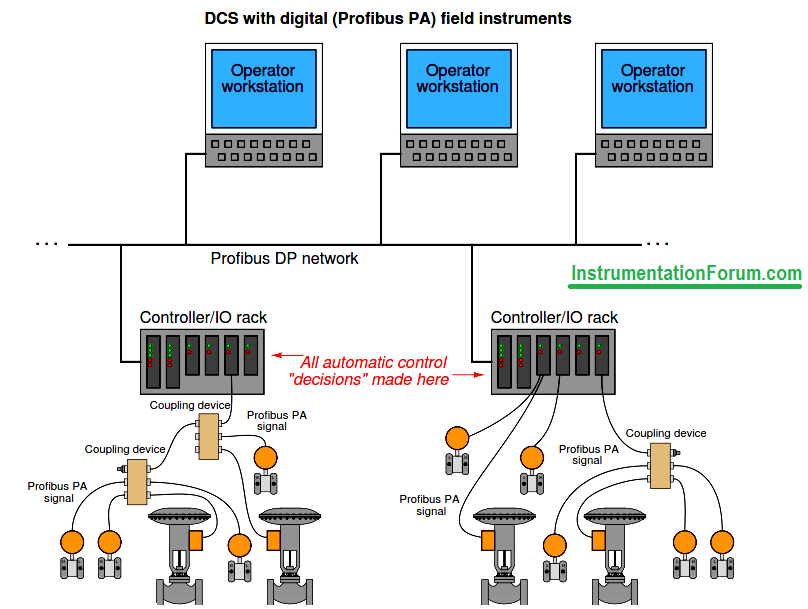
Now, multivariable field instruments have the ability to quickly exchange their data with the DCS, along with maintenance-related information (calibration ranges, error messages, and alarms). Each “fieldbus” cable is a multi-drop digital network, permitting multiple field devices per cable and consequently reducing total cable length and connection count. Coupling devices may be used in lieu of terminal blocks to conveniently connect multiple instruments together on common networks leading to the DCS. Still, however, all the automatic control algorithms are implemented in the DCS.
A FOUNDATION Fieldbus system goes one step further by allowing all control algorithms to be executed within the field instruments rather than relying on the DCS controllers to make automatic control “decisions.” In fact, the DCS would not even be necessary if not for the need of operations personnel to monitor and alter control system status:
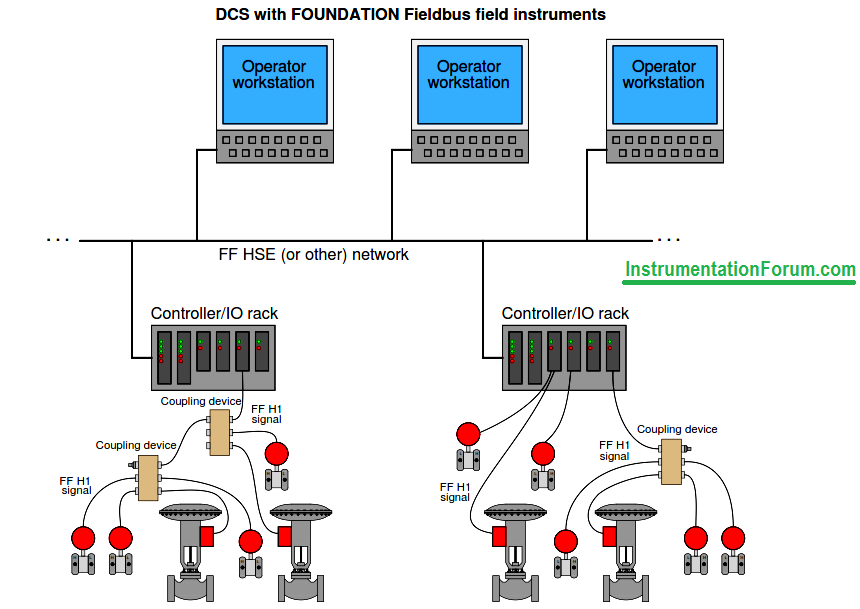
Fig : All automatic control “decisions” made at the field instrument level
That being said, it is possible (and in fact common) for control algorithms to be placed in the DCS controllers in addition to algorithms executed by FF field devices.