Engineers Community
Hydraulic PI controller
mehta2155
July 12, 2018, 2:42pm
1
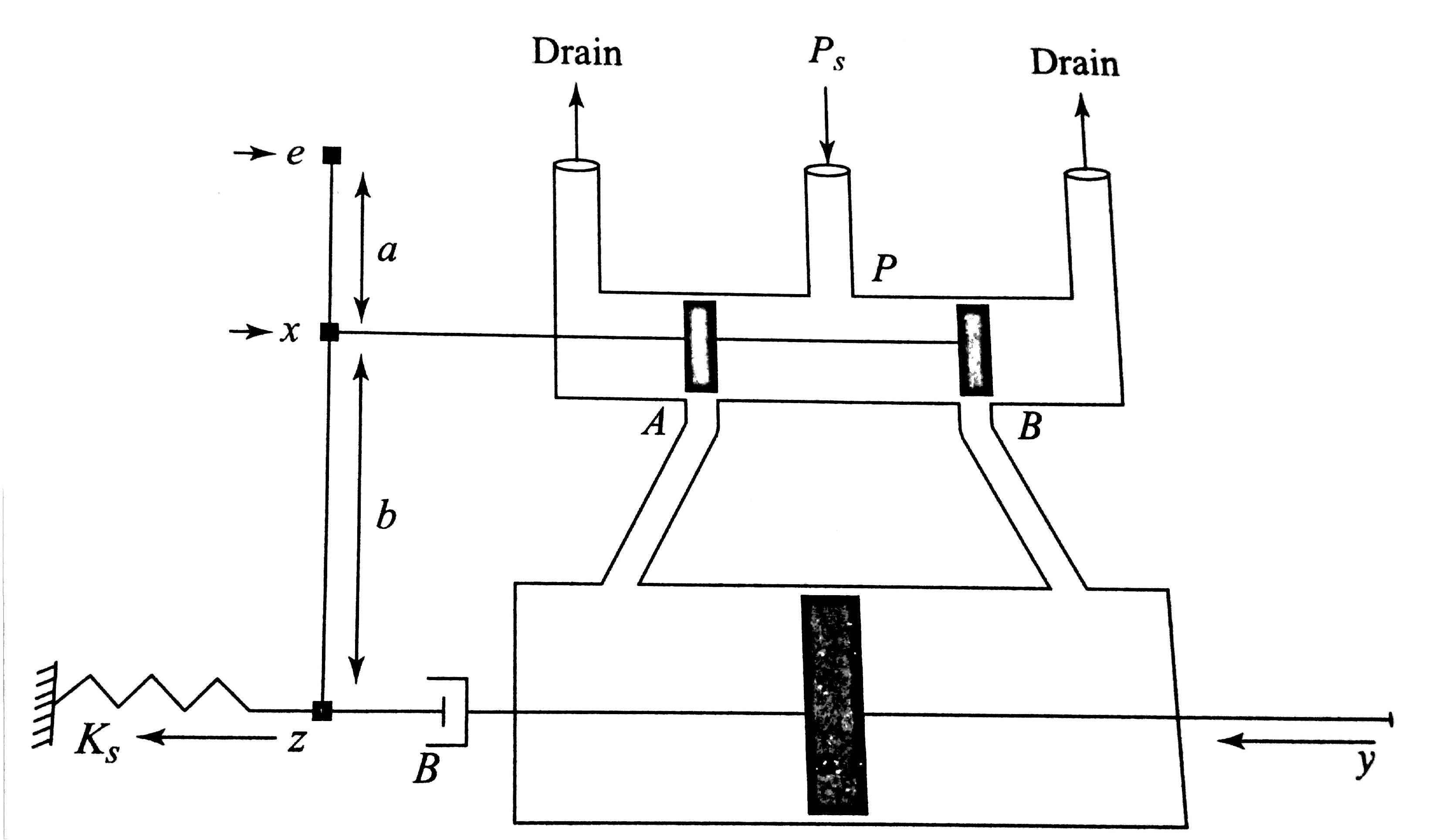
PI can be realized by inserting spring damper in feedback path.
Spring force is proportional to displacement and damping is proportional to velocity.
y2ataV8e4M0eyV23Ta5SXNJ3.jpg
3280×1928 214 KB
6 Likes